HDU 4725 The shortest Path in Nya Graph
Description
N个点分别落在各层(layer), 每层可能有多个点, 也可能没有点, 每一层和其上下两层之间的点权值为C。另外有M条权值为w的边, 求1到N的最短路径, 如果不存在输出 -1
Analyze
如果N个点均匀落在相邻两层上,那么连线是N ^ 2级别的,会TLE
优化:每层设立一个层节点,(i + n)表示第i层的层节点标号
层节点指向本层所有节点,权值为0
本层所有节点指向相邻层的层节点,权值为w
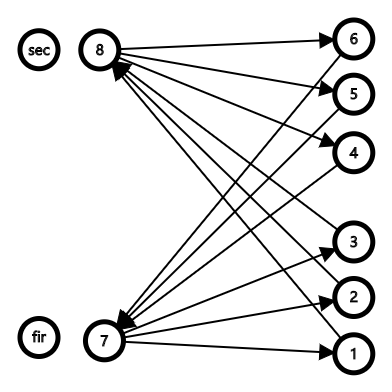
上图例子中,优化前18条单向边,优化后12条
添加层节点消耗了空间,换取了时间
另外,Dijkstra堆优化真好用,用过即AC(好过stack实现的spfa)
还有,Dijkstra堆优化存图时用vector+pair
Code
#include <queue>
#include <stack>
#include <cstdio>
#include <vector>
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 100105;
const int inf = 0x3f3f3f3f;
typedef pair<int, int> P;
vector<P> node[2 * N];
int layer[2 * N], head[2 * N], cnt, dis[2 * N], tot, sum, n, m, c;
bool vis[2 * N];
void init()
{
cnt = 0;
for(int i = 0; i <= n + n; ++i)
dis[i] = inf, vis[i] = 0, node[i].clear(), layer[i] = 0;
}
void Dijkstra()
{
priority_queue<P, vector<P>, greater<P> > q;
dis[1] = 0;
q.push(P(dis[1], 1));
while(!q.empty())
{
P now = q.top();
q.pop();
int idx = now.second;
if(vis[idx])
continue;
vis[idx] = 1;
int sz = node[idx].size();
for(int i = 0; i < sz; ++i)
{
P nxt = node[idx][i];
if(dis[nxt.second] > dis[idx] + nxt.first)
{
dis[nxt.second] = dis[idx] + nxt.first;
q.push(P(dis[nxt.second], nxt.second));
}
}
}
}
int main()
{
int t, tot = 1;
scanf("%d", &t);
while(t--)
{
scanf("%d%d%d", &n, &m, &c);
init();
for(int i = 1; i <= n; ++i)
scanf("%d", &layer[i]);
for(int i = 1; i <= n; ++i)///traverse each node instead of each layer
{
node[ layer[i] + n ].push_back(P(0, i));
if(layer[i] > 1)
node[i].push_back(P(c, layer[i] + n - 1));
if(layer[i] < n)
node[i].push_back(P(c, layer[i] + n + 1));
}
int u, v, w;
for(int i = 1; i <= m; ++i)
{
scanf("%d %d %d", &u, &v, &w);
node[u].push_back(P(w, v));
node[v].push_back(P(w, u));
}
cout << "Case #" << tot++ << ": ";
Dijkstra();
if(dis[n] != inf)
cout << dis[n] << '\n';
else
cout << "-1" << '\n';
}
return 0;
}